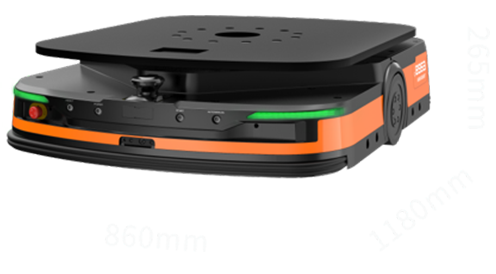





Q3-600C

600
Rated Load (kg)

135
Weight (kg)
60
Lifting Height (mm)

996
Rotation Diameter (mm)

SLAM/QR code
Navigation

8
Endurance (h)

2.0
Rated Speed (m/s)
≤2
Charging Time (h)
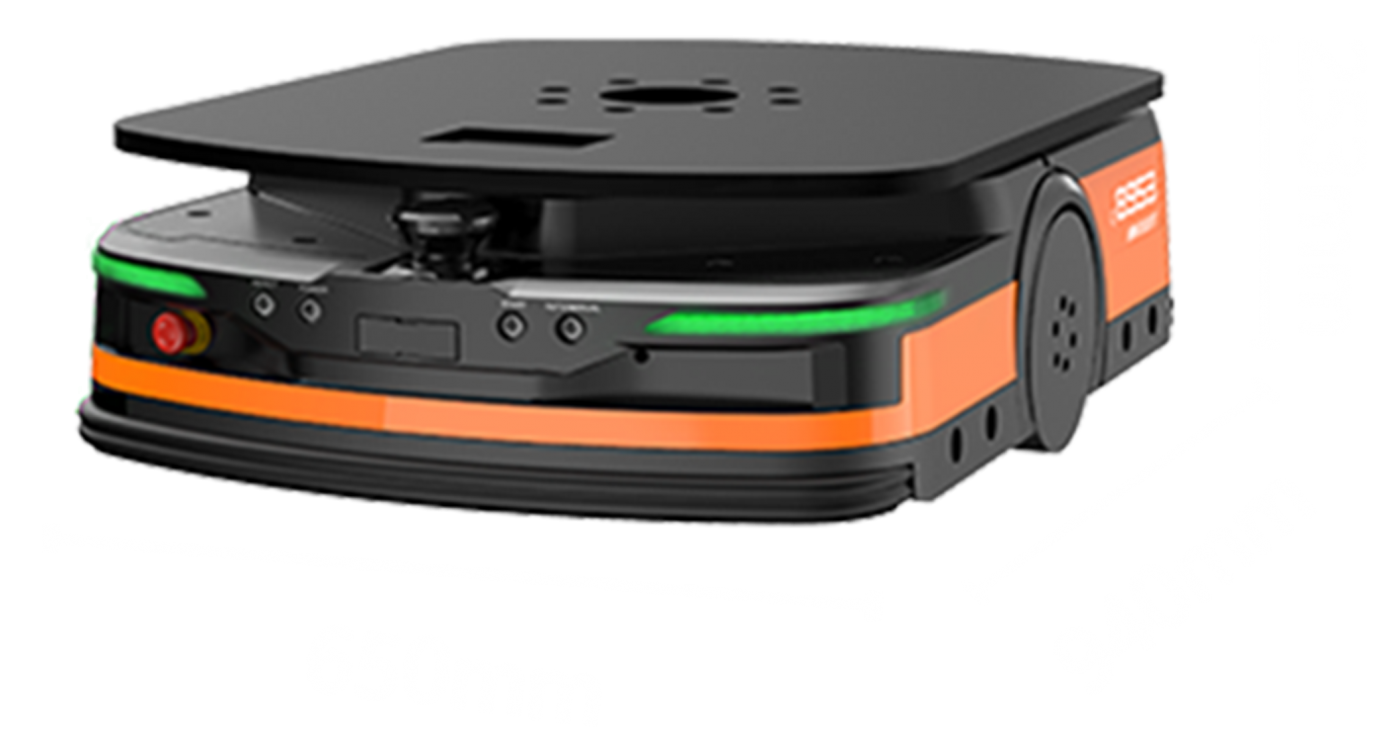
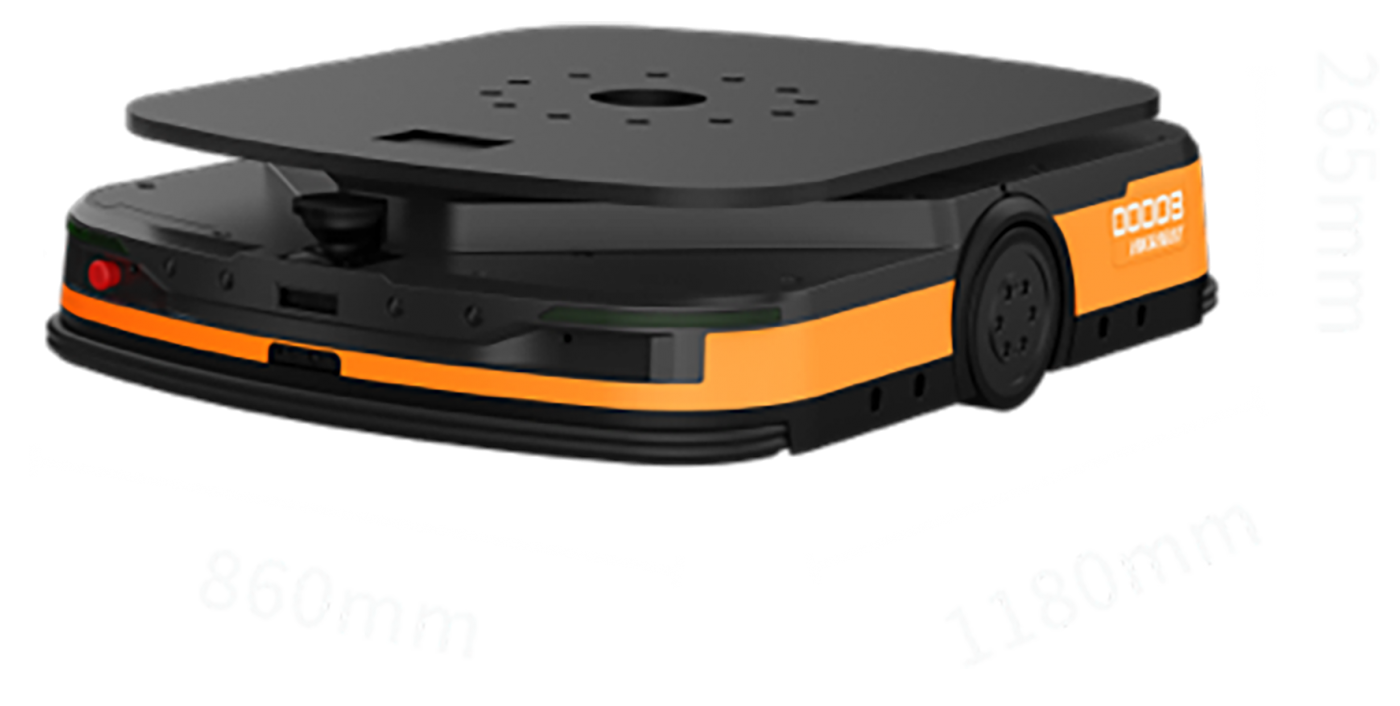
| Dimension L*W*H (mm) | : 940*650*253 |
| Rated Speed (m/s) | : 2.0 |
| Max. Rotation Speed (°/s) | : 200 |
| Position Accuracy (mm) | : ±10 |
| Charging Time (h) | : ≤1.5 |
| Driving Mode | : Differential Drive |